
PROLIXE fixed-point profiler
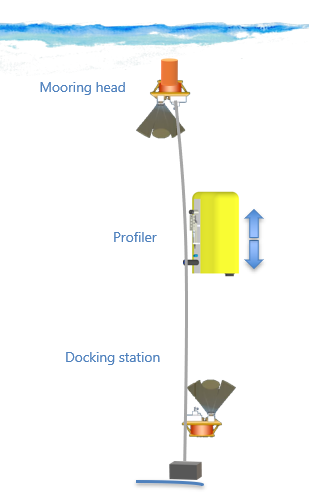
The fixed-point profiler project (known as PROLIXE) aims to develop a measurement and observation system capable of moving between the seabed (at depths of up to 4,000 m) and the subsurface, along an anchored mooring line, so as to profile the entire water column at a given geographical position. The system must be able to recharge its batteries at regular intervals on a docking station to ensure high autonomy.
Why?
Today's fixed-point water column observation systems can be divided into two general categories: oceanographic moorings and moored profiling systems.
Oceanographic moorings with fixed, autonomous sensors can have a very large vertical extension and an autonomy of more than a year. However, the distance between sensors only allows partial water column coverage. Moreover, as the acquisition frequency of the sensors is fixed and optimized to increase their autonomy, it is possible to miss events of scientific importance.
The vast majority of anchored profiling systems are fitted with a cable wrapped around a winch, enabling variation in sensor immersion. This limits their vertical extension to around 300 meters. The only type of profiler offering spatial coverage similar to that of oceanographic moorings moves along an anchored line tensioned by a subsurface buoy and carries its own battery. Its autonomy and payload are therefore limited. In addition, as the vector is sensitive to current speeds, its ability to carry out profiles in all conditions is greatly reduced.
Offering a tensioned-line profiler system the ability to recharge its battery, while improving the robustness of its displacement system, will enable users to observe the entire water column and collect representative measurements over the long term.
Finally, the ability to control all sensors via a single intelligent onboard system will enable the profiler to adapt its profiles in real-time and acquire targeted data.
What is at stake?
This project represents an evolution from the present industrial state-of-the-art, currently limited by the vector's autonomy, and is based on the academic feasibility demonstrated by the prototype based on a commercial product modified by the University of Washington. Making this new equipment available to the scientific community will open up new prospects for in situ observation. In addition, the residence of mobile vehicles is also of interest to the defense industry for surveillance purposes.
What are the main technological challenges?
In order to develop a system capable of meeting these various challenges, several technological challenges will have to be met, requiring specific R&D efforts.
The first challenge relates to maintenance-free operation: the system must be reliable, i.e. it must be able to resist the aggressions of the marine environment, such as water intake, hydrostatic pressure and corrosion. The development of biofouling, such as algae and small marine organisms, must also be limited in critical areas of the equipment, such as the guide cable, the docking station or certain sensors. The travel system is designed to enable the profiler to cover very long distances (up to 9000 km) without noticeable wear and tear.
The ability to carry out measurements throughout the water column for more than a year is directly linked to the profiler's ability to recharge its battery on its docking station. This operation adds considerable complexity to the system but eliminates the need for a voluminous on-board battery.
The absence of human oversight in carrying out its missions is another challenge. Besides having to adapt its profiles according to the data collected by its sensors, the profiler must be able to manage an abnormal event by safely returning to its docking station.
Finally, the system becomes irrelevant if unable to move in most environmental conditions. It must therefore be able to carry out its missions in the presence of marine currents.
How will this be achieved?
The system development phase will lead to the production of a prototype capable of responding to identified scientific use cases and deployable in different locations.
To achieve this, several sensor configurations will be proposed:
- Basic configuration: CTD, optode, turbidimeter, single-point current meter
- Basic configuration + biology and fisheries: UVP camera, eDNA sampler
- Basic configuration + geochemistry: CH4 sensor, pCO2 sensor, pH and redox sensor
Long-range fixed sensors, such as ADCPs (Acoustic Doppler Current Profiler) or echo sounders, placed on the docking station or the sub-surface buoy (at the top of the mooring line), will be combined with these profiler-borne sensor configurations.
This prototype will be produced in several units, which could be deployed simultaneously at several study sites, the only components unique to each site being the mooring line, whose length depends on depth, and the ballast that keeps the mooring line in a fixed position.
Project status
A preliminary project has determined the profiler's movement mode and chosen the type of connection between the docking station and the profiler, enabling its batteries to be recharged and data to be exchanged.
The shape of the docking station is currently being finalized, but that of the profiler has yet to be studied.
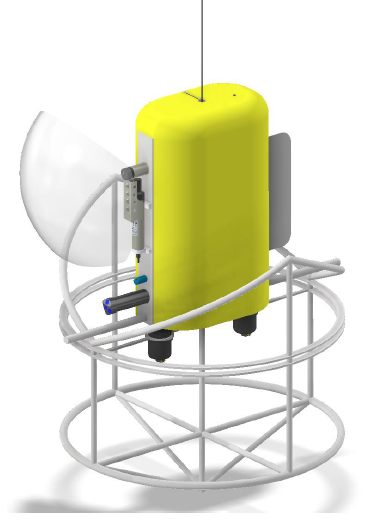
Pre-study of the PROLIXE fixed-point profiler - © Tristan Youinou IFREMER
Hydrodynamic simulations and consideration of the naval means likely to be used for deployment and recovery of the entire system enabled the dimensioning of the line cable and its sub-surface float.
The other functional blocks under development are as follows:
- Ballast-docking station liaison
- Profiler-docking station liaison
- Profiler-line liaison
- Movement system
- Profiler and sensor control algorithms
- Energy storage
Validation of these various assemblies requires many hours of testing.
Each sub-assembly must first be tested in a laboratory or workshop, then in a hyperbaric chamber to validate its operation under hydrostatic pressure.
Once these steps have been validated, the system can be assembled and the operational test phases can begin:
- Basin tests to validate the various actions to be carried out by the profiler under ideal conditions.
- Sea trials in shallow waters will verify the system's behavior in difficult current and swell conditions, and in the presence of bio-fouling development over a few days.
- Finally, deep-sea trials will complete the test phases, verifying the system's performance under real-life conditions over a period of several months.
Only when these tests have been completed will the PROLIXE fixed-point profiler be ready to be deployed for its first scientific mission, planned for the vicinity of New Caledonia in 2026, as part of the ScInObs project.
References
Daniel F. Carlson, Alexander G. Ostrovskii, Konstantin Kebkal, and Hezi Gildor. “Moored automatic mobile profilers and their applications ». 2013
T. McGinnis, N. Michel-Hart, M. Mathewson, T. Shanahan. “Deep Profiler for the Ocen Observatories Initiative Regional Scale Nodes: Rechargeable, Adaptive, ROV Serviciable”. 2013.